

Thermo-Electric-Mechanical Coupling Bending Property and Strength Analyses of Thermoelectric Devices With the Negative Poisson's Ratio Architecture
-
摘要: 随着智能可穿戴设备的快速发展,对供电元件的续航时间、便捷性以及轻量化等提出了更高要求. 热电器件可以直接将人体新陈代谢释放的热能转换为电能,为可穿戴设备持续供电. 利用整体-局部、细观-宏观相结合的分析方法,该文研究了负Poisson比热电器件的热-电-力耦合弯曲行为及其强度失效问题. 首先,通过建立负Poisson比热电器件的均质化分析模型,获取了器件的宏观弯曲特征,并给出了应力最大的截面. 然后,建立热电蜂窝的受力分析模型,利用热力学强度理论导出了胞壁的细观强度失效临界荷载. 研究发现:热电蜂窝的应力水平随着内凹角增大呈现先减小后增加的趋势;对于负Poisson比热电蜂窝,强度失效首先发生在中间部位;对于传统的六边形热电蜂窝,端部比中间部位先发生强度破坏;热电器件发生断裂破坏时,中间和端部的临界裂纹长度近似相等,可以拟合为内凹角的指数函数.
-
关键词:
- 热电器件 /
- 负Poisson比结构 /
- 强度失效 /
- 多场耦合
Abstract: The rapid development of smart wearable devices makes a higher requirement for the power supply components, including endurance, convenience and lightweight and so on. The thermoelectric devices can directly convert the thermal energy released by human metabolism into electricity, which can be further used to continuously power the wearable devices. With the global-local and micro-macro combined analysis method, the thermo-electro-mechanical coupling bending behavior and strength failure of a negative Poisson's ratio thermoelectric device (NPR-TEG) were analyzed. Firstly, the macroscopic bending characteristics and the section with the largest stress were given through the establishment a homogeneous analysis model for the NPR-TEG. Then, the force analysis model for the thermoelectric honeycomb was built. The critical load for the strength failure of a mesoscopic cell wall was also derived with the thermodynamic strength theory. The results show that, the stress level of the thermoelectric honeycomb decreases first and then increases with the re-entrant angle. For the NPR-TEG, the strength failure occurred first in the middle part of the device. For the thermoelectric device with the traditional hexagonal honeycomb, the strength failure occurs at the end of the device rather than the middle part. With the fracture failure occurring in the thermoelectric device, the critical crack length of the middle fracture approximately equals that of the end fracture. The critical crack length could be fitted as an exponential function of the re-entrant angle. -

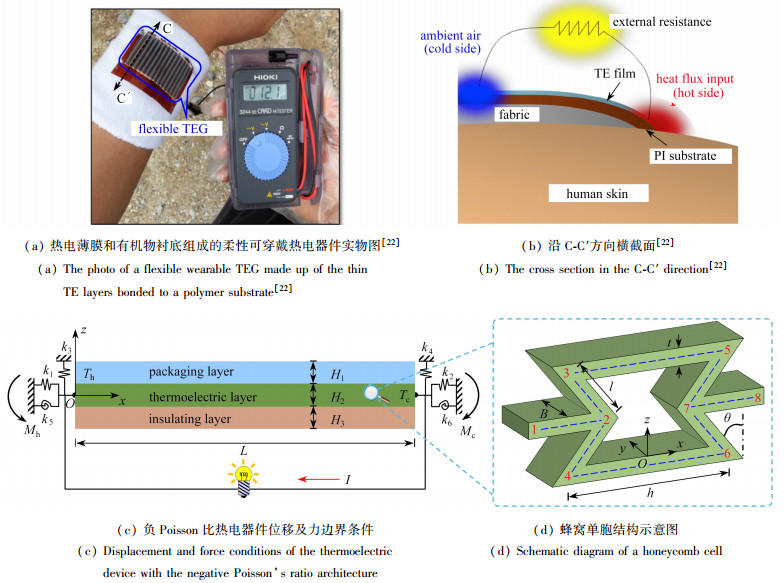
图 1 热电器件工作原理及负Poisson比热电器件分析模型
Figure 1. Schematic diagram of the working mechanism for the thermoelectric device and the analysis model for the negative Poisson's ratio thermoelectric device

图 3 利用叠加原理建立热电蜂窝受力分析模型
Figure 3. The force analysis model for the thermoelectric honeycomb established based on the superposition principle

图 4 斜胞壁在拉伸和剪切荷载作用下产生中心贯穿裂纹受力示意图
Figure 4. The stress analysis diagram of a center-through-cracked cell wall under tensile and shear combined stresses

图 5 理论模型与有限元模拟对比
Figure 5. Comparison of the theoretical model and the finite element simulation

图 6 内凹角对热电器件力学性能的影响
Figure 6. Effects of the re-entrant angle on mechanical performances of the thermoelectric generator

图 7 内凹角对热电器件失效强度的影响
Figure 7. Effects of the re-entrant angle on the failure strength of the thermoelectric generator
表 1 可穿戴热电器件材料属性和几何尺寸
Table 1. Material properties and geometric dimensions of the wearable thermoelectric device
parameter value Bi2Te3 K20=1.1 W/(m·K)
E20=63.3 GPaρ20=9.4×10-6 Ω·m
υ20=0.23λ=194 μV/K
α=8.98×10-6 KPDMS E1=E3=10 MPa υ1=υ3=0.495 dimension L=43 mm B=39 mm H1=H3=0.5 mm H2=2 mm h/l=2 t=0.5 mm  下载: 导出CSV
下载: 导出CSV
表 2 轴向应力最大值随弹簧刚度系数变化规律
Table 2. Material properties and geometric dimensions of the wearable thermoelectric device
parameter value k/(N/m2) 1×106 1×109 1×1012 1×1015 |σ|max/MPa 61.6 61.9 62.1 62.1
下载: 导出CSV
-
[1] JIANG F, ZHOU X, LV J, et al. Stretchable, breathable, and stable lead-free perovskite/polymer nanofiber composite for hybrid triboelectric and piezoelectric energy harvesting[J]. Advanced Materials, 2022, 34(17): 2200042. doi: 10.1002/adma.202200042 [2] 崔有江, 王保林, 王开发. 多孔泡沫热电器件断裂及其对能量转化性能的影响规律研究[J]. 应用数学和力学, 2023, 44(11): 1291-1298. doi: 10.21656/1000-0887.440147 CUI Youjiang, WANG Baolin, WANG Kaifa. Evaluation of fracture and its effects on energy conversion performance of porous foam thermoelectric generators[J]. Applied Mathematics and Mechanics, 2023, 44(11): 1291-1298. (in Chinese) doi: 10.21656/1000-0887.440147 [3] SHI X L, SUN S, WU T, et al. Weavable thermoelectrics: advances, controversies, and future developments[J]. Materials Futures, 2024, 3(1): 012103. doi: 10.1088/2752-5724/ad0ca9 [4] YANG Y, DENG H, FU Q. Recent progress on PEDOT: PSS based polymer blends and composites for flexible electronics and thermoelectric devices[J]. Materials Chemistry Frontiers, 2020, 4(11): 3130-3152. doi: 10.1039/D0QM00308E [5] SUN T T, ZHOU B Y, ZHENG Q, et al. Stretchable fabric generates electric power from woven thermoelectric fibers[J]. Nature Communications, 2020, 11(1): 572. doi: 10.1038/s41467-020-14399-6 [6] NAN K W, KANG S D, LI K, et al. Compliant and stretchable thermoelectric coils for energy harvesting in miniature flexible devices[J]. Science Advances, 2018, 4(11): eaau5849. doi: 10.1126/sciadv.aau5849 [7] KONG D Y, ZHU W, GUO Z P, et al. High-performance flexible Bi2Te3 films based wearable thermoelectric generator for energy harvesting[J]. Energy, 2019, 175: 292-299. doi: 10.1016/j.energy.2019.03.060 [8] ZHAO X, ZHAO C S, JIANG Y F, et al. Flexible cellulose nanofiber/Bi2Te3 composite film for wearable thermoelectric devices[J]. Journal of Power Sources, 2020, 479: 229044. doi: 10.1016/j.jpowsour.2020.229044 [9] KARTHIKEYAN V, SURJADI J U, WONG J C K, et al. Wearable and flexible thin film thermoelectric module for multi-scale energy harvesting[J]. Journal of Power Sources, 2020, 455: 227983. doi: 10.1016/j.jpowsour.2020.227983 [10] CUI Y J, WANG B L, WANG P. Analysis of thermally induced delamination and buckling of thin-film thermoelectric generators made up of pn-junctions[J]. International Journal of Mechanical Sciences, 2018, 149: 393-401. doi: 10.1016/j.ijmecsci.2017.10.049 [11] KOGO G, XIAO B, DANQUAH S, et al. A thin film efficient pn-junction thermoelectric device fabricated by self-align shadow mask[J]. Scientific Reports, 2020, 10(1): 1067. doi: 10.1038/s41598-020-57991-y [12] ROJAS J P, SINGH D, CONCHOUSO D, et al. Stretchable helical architecture inorganic-organic hetero thermoelectric generator[J]. Nano Energy, 2016, 30: 691-699. doi: 10.1016/j.nanoen.2016.10.054 [13] XU X J, ZUO Y, CAI S, et al. Three-dimensional helical inorganic thermoelectric generators and photodetectors for stretchable and wearable electronic devices[J]. Journal of Materials Chemistry C, 2018, 6(18): 4866-4872. doi: 10.1039/C8TC01183D [14] FENG R, TANG F, ZHANG N, et al. Flexible, high-power density, wearable thermoelectric nanogenerator and self-powered temperature sensor[J]. ACS Applied Materials & Interfaces, 2019, 11(42): 38616-38624. [15] LEE G, KIM C S, KIM S, et al. Flexible heatsink based on a phase-change material for a wearable thermoelectric generator[J]. Energy, 2019, 179: 12-18. doi: 10.1016/j.energy.2019.05.018 [16] FUKUIE K, IWATA Y, IWASE E. Design of substrate stretchability using origami-like folding deformation for flexible thermoelectric generator[J]. Micromachines, 2018, 9(7): 315. doi: 10.3390/mi9070315 [17] PARK H, LEE D, KIM D, et al. High power output from body heat harvesting based on flexible thermoelectric system with low thermal contact resistance[J]. Journal of Physics D: Applied Physics, 2018, 51(36): 365501. doi: 10.1088/1361-6463/aad270 [18] 周世奇, 侯秀慧, 邓子辰. 一般宏观应力状态下凹角蜂窝结构的屈曲性能分析[J]. 应用数学和力学, 2023, 44(1): 12-24. doi: 10.21656/1000-0887.430202ZHOU Shiqi, HOU Xiuhui, DENG Zichen. Buckling analysis of re-entrant honeycomb structures under general macroscopic stress states[J]. Applied Mathematics and Mechanics, 2023, 44(1): 12-24. (in Chinese) doi: 10.21656/1000-0887.430202 [19] CUI Y J, LIU C, WANG K F, et al. Effect of negative Poisson's ratio architecture on fatigue life and output power of flexible wearable thermoelectric generators[J]. Engineering Fracture Mechanics, 2023, 281: 109142. doi: 10.1016/j.engfracmech.2023.109142 [20] CUI Y J, LI W J, WANG K F, et al. Thermal shock fracture of honeycomb-based porous thermoelectric materials with non-Fourier heat conduction[J]. Ceramics International, 2024, 50(1): 2151-2161. doi: 10.1016/j.ceramint.2023.10.328 [21] CUI Y J, WANG B L, WANG K F, et al. An analytical model to evaluate influence of negative Poisson's ratio architecture on fatigue life and energy conversion performance of wearable thermoelectric generator[J]. International Journal of Solids and Structures, 2022, 258: 112000. doi: 10.1016/j.ijsolstr.2022.112000 [22] WE J H, KIM S J, CHO B J. Hybrid composite of screen-printed inorganic thermoelectric film and organic conducting polymer for flexible thermoelectric power generator[J]. Energy, 2014, 73: 506-512. doi: 10.1016/j.energy.2014.06.047 [23] HU J S, WANG B L, HIRAKATA H, et al. Interfacial thermal damage and fatigue between auxetic honeycomb sandwich and underneath substrate[J]. International Journal of Solids and Structures, 2023, 279: 112364. doi: 10.1016/j.ijsolstr.2023.112364 [24] PENG J, LI D K, HUANG Z X, et al. Interfacial behavior of a thermoelectric film bonded to a graded substrate[J]. Applied Mathematics and Mechanics(English Edition), 2023, 44(11): 1853-1870. doi: 10.1007/s10483-023-3045-8 [25] MIAO X Y, LI C F, PAN Y C. Research on the dynamic characteristics of rotating metal-ceramic matrix DFG-CNTRC thin laminated shell with arbitrary boundary conditions[J]. Thin-Walled Structures, 2022, 179: 109475. doi: 10.1016/j.tws.2022.109475 [26] 王彪. 热力学强度理论[J]. 力学进展, 2023, 53(3): 693-712.WANG Biao. Thermodynamic strength theory (TST)[J]. Advances in Mechanics, 2023, 53(3): 693-712. (in Chinese) [27] WANG B. The principle of virtual energy for predicting the strength of material structures[J]. Engineering Fracture Mechanics, 2024, 300: 109997. doi: 10.1016/j.engfracmech.2024.109997 [28] JANSSEN M, ZUIDEMA J, WANHILL R J H. Fracture Mechanics[M]. 2nd ed. London: Spon Press, 2004: 83-106. [29] 蒋玉川, 蒲淳清. 用Westergaard应力函数求解Ⅰ-Ⅱ复合型平面裂纹问题的研讨[J]. 力学与实践, 2020, 42(4): 504-507.JIANG Yuchuan, PU Chunqing. The problem of Ⅰ-Ⅱ combined plane crack solved with Westergaard stress function[J]. Mechanics in Engineering, 2020, 42(4): 504-507. (in Chinese) -







计量
- 文章访问数: 723
- HTML全文浏览量: 308
- PDF下载量: 93
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号