

Study on Mechanical Properties of Barbed Contact Metamaterials
-
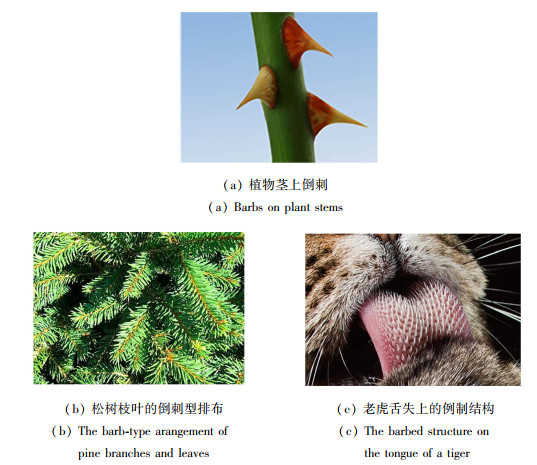
摘要: 受到一些植物茎部和部分猫科动物舌头上的倒刺结构在不同方向上表现出差异性的启发,该研究设计了一种可重复使用且易恢复的倒刺型超材料,并对其力学性能进行了理论分析和数值分析. 研究结果表明,在倒刺的往复运动中,当选取矩形截面高×宽为1 mm×1 mm,长为20 mm,且与竖直方向呈60°角的倒刺时,与阻挡凸台正向接触过程中的最大反力约为逆向接触过程中最大反力的20倍左右,而所消耗能量则相差约200倍. 当倒刺与竖直方向的角度减小时,倒刺结构吸收能量更多,恢复所需能量更少;当倒刺长度增大时,倒刺结构吸收能量减小,恢复时所需能量也减小. 这表明该结构具有出色的抗冲击性能和能量吸收能力,正逆向所需能量差异较大,结构更容易恢复,并且可以通过对倒刺角度和长度设计提升吸能效率.Abstract: Inspired by the differences in the barbed structures of some plant stems and cat tongues in different directions, a reusable and easy-to-recover barbed metamaterial was designed, with its mechanical properties analyzed theoretically and numerically. The results show that, in the reciprocating motion of the barbs, when the barb rectangular section sizes are 1 mm × 1 mm, the length is 20 mm, and the angle with the vertical direction is 60°, the maximum reaction force in the forward contact process with the blocking rib will be about 20 times of the maximum reaction force in the reverse contact process, and the former energy consumption is about 200 times of the latter. With the decrease of the angle between the barb and the vertical direction, the barb structure will exhibit a higher energy absorption capacity and a reduced energy requirement for recovery. Similarly, with the increase of the barb length, the structure energy absorption will be lower and the energy required for recovery will reduce. These characteristics indicate that, the structure possesses excellent impact resistance and energy absorption capacity. Structures with significant energy disparities between forward and backward motions are more easily recoverable, and the energy absorption efficiency can be enhanced by carefully designing the angles and lengths of the barbs.
-
Key words:
- bionic /
- anisotropic /
- metamaterial /
- energy absorption /
- easy recovery
-

图 3 倒刺吸能结构简化平面图
Figure 3. The simplified plan of the barbed energy absorption structure

图 6 吸能与恢复过程理论分析与数值模拟力-位移对比图
注 为了解释图中的颜色,读者可以参考本文的电子网页版本,后同.
Figure 6. Theoretical analysis of energy absorption and recovery processes and numerical simulation of force-displacement curves

图 7 倒刺与竖直方向不同角度下吸能和恢复方向的力-位移曲线
Figure 7. Force-displacement curves of energy absorption and recovery processes under different angles of barbed and vertical directions

图 8 不同倒刺长度的吸能和恢复方向的力-位移曲线
Figure 8. Force-displacement curves of energy absorption and recovery processes with of different barb lengths
表 1 吸能过程理论解与数值模拟凸台在不同位置时力的大小和凸台与倒刺脱离时的能量
Table 1. Theoretical solution of the energy absorption process and numerical simulation of the force of the rib in different positions and the energy of the rib at the moment of sepration from the barb
displacement D/mm 1 3 5 6 7 10 15 17.84(separation) Eint/mJ FFEM/mN 4.04 12.35 20.01 23.58 33.38 51.97 71.32 72.91 0.644 2 Ftheory/mN 4.01 12.18 19.71 23.14 32.52 51.06 69.95 70.22 0.627 9 relative error δ 0.007 0.013 0.015 0.019 0.026 0.027 0.029 0.037 0.026  下载: 导出CSV
下载: 导出CSV
表 2 恢复过程理论解与数值模拟凸台在不同位置时力的大小和凸台与倒刺脱离时的能量
Table 2. The theoretical solution of the recovery process and the numerical simulation of the force of the rib in different positions and the energy of the rib at the moment of sepration from the barb
displacement D/mm 1 1.5 2 2.14(separation) Eres/mJ FFEM/mN 1.53 2.56 4.03 4.52 0.003 30 Ftheory/mN 1.52 2.54 3.99 4.45 0.003 26 relative error δ 0.006 0.008 0.010 0.015 0.011
下载: 导出CSV
表 3 倒刺与竖直方向不同角度下吸能和恢复所用能量及比能耗
Table 3. The absorption and recovery of energy and specific energy consumption in barbed and vertical directions at different angles
angle φ/(°) 40 50 60 70 80 energy-absorption Eint/mJ 1.592 1 1.059 55 0.644 2 0.372 7 0.093 energy-recovery Eres/mJ 0.001 9 0.003 0.003 3 0.005 0.007 3 specific energy consumption Eint/Eres 837.95 353.18 195.21 74.54 12.74
下载: 导出CSV
表 4 不同倒刺长度的吸能和恢复所用能量及比能耗
Table 4. Energy absorption and recovery energy and specific energy consumption with different barb lengths
length L/mm 20 22 24 26 28 energy-absorption Eint/mJ 0.644 2 0.551 5 0.530 6 0.453 8 0.437 3 energy-recovery Eres/mJ 0.003 3 0.002 5 0.002 3 0.001 6 0.001 3 specific energy consumption Eint/Eres 195.21 220.60 230.70 283.63 336.38
下载: 导出CSV
-
[1] XU R, HE Y, LI X, et al. Snap-fit mechanical metamaterials[J]. Applied Materials Today, 2023, 30: 101714. doi: 10.1016/j.apmt.2022.101714 [2] PAN F, LI Y, LI Z, et al. 3D pixel mechanical metamaterials[J]. Advanced Materials, 2019, 31(25): 1900548. doi: 10.1002/adma.201900548 [3] 王竞哲, 陈保才, 朱绍伟, 等. 圆锥形负刚度超材料吸能性能研究[J]. 应用数学和力学, 2023, 44(10): 1172-1179. doi: 10.21656/1000-0887.440055WANG Jingzhe, CHEN Baocai, ZHU Shaowei, et al. Study on energy absorption performances of conical negative stiffness metamaterials[J]. Applied Mathematics and Mechanics, 2023, 44(10): 1172-1179. (in Chinese) doi: 10.21656/1000-0887.440055 [4] 姬忠莹, 闫昌友, 张晓琴, 等. 仿生取向结构表界面及其摩擦各向异性研究进展[J]. 表面技术, 2018, 47(6): 112-121.JI Zhongying, YAN Changyou, ZHANG Xiaoqin, et al. Research advances in biomimetic surfaces with oriented structures and its frictional anisotropy[J]. Surface Technology, 2018, 47(6): 112-121. (in Chinese) [5] MA S, SCARAGGI M, YAN C, et al. Bioinspired 3D printed locomotion devices based on anisotropic friction[J]. Small, 2018, 15(1): 1802931. [6] KLATT T, HABERMAN M R. A nonlinear negative stiffness metamaterial unit cell and small-on-large multiscale material model[J]. Journal of Applied Physics, 2013, 114(3): 033503. doi: 10.1063/1.4813233 [7] FANG N, XI D, XU J, et al. Ultrasonic metamaterials with negative modulus[J]. Nature Materials, 2006, 5(6): 452-456. doi: 10.1038/nmat1644 [8] DING Y, LIU Z, QIU C, et al. Metamaterial with simultaneously negative bulk modulus and mass density[J]. Physical Review Letters, 2007, 99(9): 093904. doi: 10.1103/PhysRevLett.99.093904 [9] LAKES R. Foam structures with a negative Poisson's ratio[J]. Science, 1987, 235(4792): 1038-1040. doi: 10.1126/science.235.4792.1038 [10] ABRAMOWICZ W, JONES N. Dynamic axial crushing of circular tubes[J]. International Journal of Impact Engineering, 1984, 2(3): 263-281. doi: 10.1016/0734-743X(84)90010-1 [11] REID S R, REDDY T Y, GRAY M D. Static and dynamic axial crushing of foam-filled sheet metal tubes[J]. International Journal of Mechanical Sciences, 2011, 28(5): 295-322. [12] REDDY T Y, REID S R. Axial splitting of circular metal tubes[J]. International Journal of Mechanical Sciences, 1986, 28(2): 111-131. doi: 10.1016/0020-7403(86)90018-4 [13] 侯海量, 朱锡, 李伟. 轻型陶瓷/金属复合装甲抗弹机理研究[J]. 兵工学报, 2013, 34(1): 105-114.HOU Hailiang, ZHU Xi, LI Wei. Investigation on bullet proof mechanism of light ceramic/steel composite armor[J]. Acta Armamentarii, 2013, 34(1): 105-114. (in Chinese) [14] 侯海量, 朱锡, 阚于龙. 陶瓷材料抗冲击响应特性研究进展[J]. 兵工学报, 2008, 29(1): 94-99.HOU Hailiang, ZHU Xi, KAN Yulong. Advance ot dynamic behavior of ceramic material under the impact of projectile[J]. Acta Armamentarii, 2008, 29(1): 94-99. (in Chinese) [15] CONWAY H D. The nonlinear bending of thin circular rods[J]. Journal of Applied Mechanics, 1956, 23(1): 7-10. [16] 裴晓辉. 悬臂梁平面大变形的椭圆函数解[D]. 西安: 西安电子科技大学, 2014.PEI Xiaohui. Elliptic function solution to large-deflection problems of cantilever beams[D]. Xi'an: Xidian University, 2014. (in Chinese) [17] 刘鸿文. 材料力学[M]. 北京: 高等教育出版社, 2011: 175-189.LIU Hongwen. Mechanics of Materials[M]. Beijing: Higher Education Press, 2011: 175-189. (in Chinese) [18] SHVARTSMAN B S. Large deflections of a cantilever beam subjected to a follower force[J]. Journal of Sound and Vibration, 2007, 304(3): 969-973. [19] GREENHILL G. The Applications of Elliptic Functions[M]. London: Macmillan, 1892: 277-305. [20] ARMITAGE J V, EBERLEIN W F. Elliptic Functions[M]. Cambridge: Cambridge University Press, 2006: 324-366. [21] HOWELL L L, MIDHA A. A method for the design of compliant mechanisms with small-length flexural pivots[J]. Journal of Mechanical Design, 1994, 116(1): 280-290. [22] JONSSON A. Some guidelines for implicit analyses using LS-DYNA[Z]. 4th revision. 2014. -








计量
- 文章访问数: 296
- HTML全文浏览量: 126
- PDF下载量: 42
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号