

Analytical Forced Vibration Solutions of Orthotropic Cantilever Rectangular Thin Plates With the Symplectic Superposition Method
-
摘要: 基于辛叠加方法研究了正交各向异性矩形悬臂薄板在谐载载荷作用下的受迫振动问题. 首先从薄板受迫振动的基本方程出发,将问题导入到Hamilton体系,并将原问题拆分为若干子问题,然后在辛空间中利用分离变量和本征展开方法推导出子问题的解析解,最后通过叠加求解出悬臂薄板受迫振动的解析解. 辛叠加方法的主要优点是经过逐步严格推导获得解析解,不需要对解的形式做任何假设,突破了传统半逆解法的限制. 算例针对不同谐载载荷情况进行了数值计算,并将该文方法与有限元方法获得的结果进行比较,验证了该文方法的可靠性和精确性.Abstract: The forced vibrations of orthotropic cantilever rectangular thin plates under harmonic loadings were investigated with the symplectic superposition method. The basic equations for the forced vibration of thin plates were introduced into the Hamiltonian system. The original problem was divided into some fundamental subproblems, and the analytical solutions of the subproblems were derived with the method of separation of variables and through eigenvector expansion in the symplectic space. The solution of the original problem was finally obtained by superposition. The main advantage of the symplectic superposition method is that the analytical solution can be obtained by step-by-step rigorous derivation, without any assumptions on the form of the solution, which breaks through the limitations of traditional semi-inverse methods. The numerical results calculated corresponding to different harmonic loads were compared with those obtained via the finite element method to verify the reliability and accuracy of the proposed method.
-
Key words:
- symplectic superposition method /
- orthotropic thin plate /
- analytical solution /
- forced vibration
edited-byedited-by1) (我刊编委李锐来稿) -

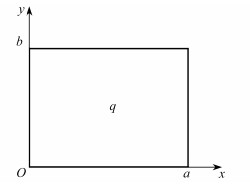
图 1 正交各向异性矩形薄板示意图
Figure 1. Schematic diagram of an orthotropic rectangular thin plate

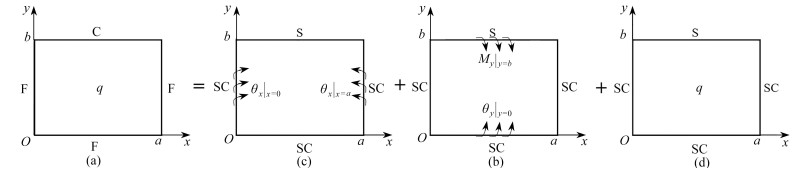
图 2 矩形悬臂薄板受迫振动问题的辛叠加示意图
Figure 2. Symplectic superposition of the forced vibration of a cantilever rectangular thin plate

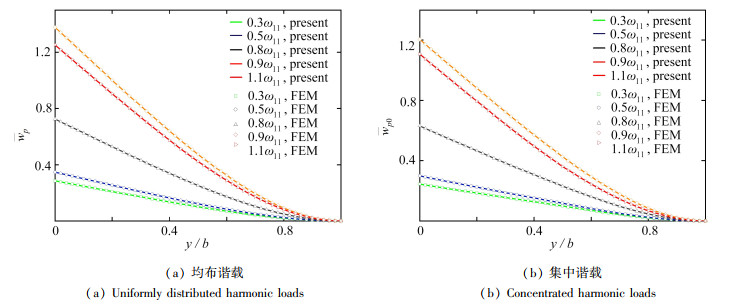
图 3 不同谐载频率下正交各向异性悬臂板x=a/2处的无量纲挠度沿y轴变化曲线
Figure 3. Non-dimensional deflections along the y axis at x=a/2 of an orthotropic cantilever plate under different frequencies of harmonic loads

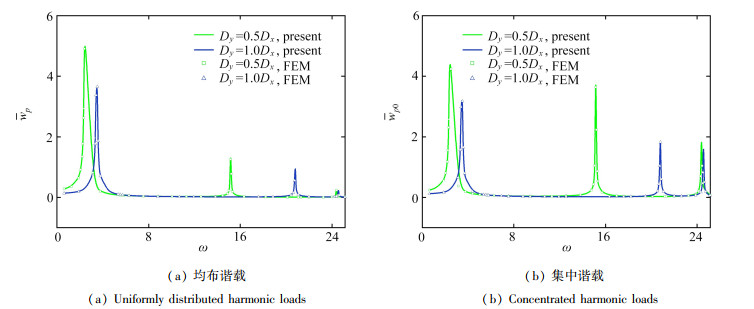
图 4 正交各向异性悬臂板在不同弯曲刚度下的频率响应曲线
注 为了解释图中的颜色,读者可以参考本文的电子网页版本,后同.
Figure 4. Frequency response curves of orthotropic cantilever plates with different flexural rigidities
表 1 均布谐载下正交各向异性悬臂板的无量纲挠度和弯矩收敛性分析
Table 1. Convergence of non-dimensional deflections and bending moments of an orthotropic cantilever plate under a uniformly distributed harmonic load
ω/ω11 N 10 20 30 40 50 60 70 80 90 100 $\bar{w}_{p}(0, 0)$ 0.3 0.282 1 0.282 0 0.282 0 0.282 0 0.282 0 0.282 0 0.282 0 0.282 0 0.282 0 0.282 0 0.5 0.343 0 0.342 9 0.342 9 0.342 8 0.342 8 0.342 8 0.342 8 0.342 8 0.342 8 0.342 8 0.8 0.718 4 0.718 0 0.717 9 0.717 9 0.717 9 0.717 9 0.717 9 0.717 9 0.717 9 0.717 9 1.1 1.236 5 1.237 5 1.237 7 1.237 7 1.237 8 1.237 8 1.237 8 1.237 8 1.237 8 1.237 8 $ \bar{w}_{p}(0, 0.4 b) $ 0.3 0.130 5 0.130 4 0.130 4 0.130 4 0.130 4 0.130 4 0.130 4 0.130 4 0.130 4 0.130 4 0.5 0.157 8 0.157 7 0.157 7 0.157 7 0.157 7 0.157 7 0.157 7 0.157 7 0.157 7 0.157 7 0.8 0.326 1 0.325 9 0.325 8 0.325 8 0.325 8 0.325 8 0.325 8 0.325 8 0.325 8 0.325 8 1.1 0.550 0 0.550 4 0.550 5 0.550 5 0.550 5 0.550 5 0.550 5 0.550 5 0.550 5 0.550 5 $ \bar{M}_{y}(0.5 a, b) $ 0.3 -0.603 0 -0.578 9 -0.593 2 -0.583 2 -0.590 7 -0.584 3 -0.584 3 -0.584 4 -0.584 4 -0.584 4 0.5 -0.720 4 -0.691 5 -0.708 5 -0.696 5 -0.705 6 -0.697 9 -0.697 9 -0.698 0 -0.698 0 -0.698 0 0.8 -1.443 6 -1.384 5 -1.418 7 -1.394 7 -1.412 7 -1.397 4 -1.397 6 -1.397 7 -1.397 8 -1.397 8 1.1 -2.319 1 -2.225 1 -2.281 0 -2.242 8 -2.271 5 -2.247 4 -2.247 7 -2.247 9 -2.248 1 -2.248 1  下载: 导出CSV
下载: 导出CSV
表 2 中心点处作用集中谐载的正交各向异性悬臂板的无量纲挠度和弯矩收敛性分析
Table 2. Convergence of non-dimensional deflections and bending moments of an orthotropic cantilever plate under a concentrated harmonic load at the center
ω/ω11 N 10 30 50 70 90 110 120 130 140 150 $\bar{w}_{p 0}(0, 0)$ 0.3 0.237 3 0.238 3 0.238 4 0.238 4 0.238 4 0.238 4 0.238 4 0.238 4 0.238 4 0.238 4 0.5 0.290 5 0.291 8 0.291 9 0.291 9 0.291 9 0.291 9 0.291 9 0.291 9 0.291 9 0.291 9 0.8 0.619 2 0.621 4 0.621 7 0.621 7 0.621 7 0.621 8 0.621 8 0.621 8 0.621 8 0.621 8 1.1 1.092 4 1.098 0 1.098 5 1.098 6 1.098 7 1.098 7 1.098 7 1.098 7 1.098 7 1.098 7 $\bar{w}_{p 0}(0, 0.4 b)$ 0.3 0.114 8 0.115 1 0.115 2 0.115 2 0.115 2 0.115 2 0.115 2 0.115 2 0.115 2 0.115 2 0.5 0.138 7 0.139 1 0.139 2 0.139 2 0.139 2 0.139 2 0.139 2 0.139 2 0.139 2 0.139 2 0.8 0.286 1 0.287 0 0.287 1 0.287 1 0.287 1 0.287 1 0.287 1 0.287 1 0.287 1 0.287 1 1.1 0.480 8 0.483 3 0.483 6 0.483 6 0.483 7 0.483 7 0.483 7 0.483 7 0.483 7 0.483 7 $\bar{M}_{y 0}(0.5 a, b)$ 0.3 -0.630 6 -0.621 5 -0.619 1 -0.613 3 -0.613 4 -0.613 4 -0.613 5 -0.613 5 -0.613 5 -0.613 5 0.5 -0.733 8 -0.723 2 -0.720 5 -0.713 6 -0.713 7 -0.713 8 -0.713 8 -0.713 8 -0.713 8 -0.713 8 0.8 -1.367 9 -1.348 5 -1.343 4 -1.329 9 -1.330 1 -1.330 3 -1.330 4 -1.330 3 -1.330 4 -1.330 4 1.1 -1.924 8 -1.902 7 -1.895 5 -1.875 1 -1.875 5 -1.875 7 -1.876 0 -1.875 9 -1.876 0 -1.876 0
下载: 导出CSV
表 3 各向同性悬臂板的无量纲挠度和弯矩
Table 3. Non-dimensional deflections and bending moments of an isotropic cantilever plate
ω/ω11 method $\bar{w}_{p}\left(\bar{w}_{p 0}\right), x=0$ $\bar{w}_{p}\left(\bar{w}_{p 0}\right), y=0$ $\bar{M}_{y}\left(\bar{M}_{y 0}\right), y=b$ y=0 y=0.1b y=0.3b x=0.1a x=0.3a x=0.5a x=0.1a x=0.3a x=0.5a uniformly distributed harmonic load 0.3 present 0.137 9 0.119 3 0.082 4 0.047 8 0.138 3 0.138 8 0.139 0 -0.548 4 -0.562 5 FEM 0.137 9 0.119 3 0.082 4 0.047 8 0.138 3 0.138 8 0.139 0 -0.538 0 -0.554 5 ref. [20] 0.142 2 0.123 0 0.084 8 0.049 1 0.142 5 0.142 9 0.143 1 -0.581 1 -0.569 7 0.5 present 0.167 7 0.144 9 0.099 9 0.057 7 0.168 1 0.168 8 0.169 0 -0.653 4 -0.671 1 FEM 0.167 7 0.144 9 0.099 9 0.057 7 0.168 1 0.168 8 0.169 1 -0.641 3 -0.662 0 ref. [20] 0.174 2 0.150 5 0.102 5 0.059 7 0.174 5 0.175 0 0.175 2 -0.696 8 -0.684 7 0.8 present 0.350 9 0.302 7 0.207 3 0.118 6 0.351 9 0.353 5 0.354 0 -1.298 9 -1.339 5 FEM 0.350 9 0.302 7 0.207 3 0.118 6 0.351 9 0.353 5 0.354 0 -1.276 1 -1.322 4 ref. [20] 0.381 6 0.329 0 0.225 0 0.128 5 0.382 5 0.383 8 0.384 2 -1.448 1 -1.430 7 1.1 present 0.605 5 0.520 7 0.353 3 0.199 2 0.607 4 0.610 4 0.611 4 -2.067 1 -2.145 7 FEM 0.605 8 0.521 0 0.353 5 0.199 3 0.607 7 0.610 6 0.611 7 -2.035 0 -2.123 1 concentrated harmonic load at the center 0.3 present 0.114 1 0.099 4 0.070 0 0.041 4 0.115 7 0.118 2 0.119 3 -0.492 3 -0.581 7 FEM 0.114 0 0.099 4 0.070 0 0.041 4 0.115 6 0.118 2 0.119 3 -0.483 5 -0.572 9 ref. [20] 0.116 3 0.101 3 0.071 3 0.042 1 0.117 8 0.120 4 0.121 5 -0.451 1 -0.568 7 0.5 present 0.140 1 0.121 8 0.085 3 0.050 1 0.141 8 0.144 5 0.145 6 -0.584 4 -0.677 1 FEM 0.140 0 0.121 8 0.085 3 0.050 1 0.141 7 0.144 5 0.145 6 -0.574 1 -0.667 3 ref. [20] 0.143 8 0.125 0 0.087 4 0.051 3 0.145 4 0.148 1 0.149 2 -0.536 8 -0.664 7 0.8 present 0.300 4 0.259 8 0.179 3 0.103 4 0.302 5 0.306 0 0.307 5 -1.149 9 -1.262 9 FEM 0.300 3 0.259 8 0.179 3 0.103 4 0.302 5 0.306 0 0.307 4 -1.130 2 -1.246 2 ref. [20] 0.322 1 0.278 4 0.191 9 0.110 5 0.324 1 0.327 5 0.328 9 -1.090 0 -1.283 4 1.1 present 0.536 6 0.460 7 0.311 3 0.174 7 0.537 0 0.537 4 0.537 5 -1.794 1 -1.784 9 FEM 0.536 9 0.461 0 0.311 4 0.174 8 0.537 3 0.537 6 0.537 6 -1.766 0 -1.767 2
下载: 导出CSV
表 4 均布谐载下正交各向异性悬臂板的无量纲挠度和弯矩(b=a)
Table 4. Non-dimensional deflections and bending moments of orthotropic cantilever plates under uniformly distributed harmonic loads, with b=a
Dy/Dx ω/ω11 method $\bar{w}_p, x=0$ $\bar{w}_p, y=0$ $\bar{M}_y, y=b$ y=0 y=0.4b y=0.8b x=0.1a x=0.3a x=0.5a x=0.1a x=0.3a x=0.5a 0.5 0.3 present 0.282 0 0.130 4 0.016 3 0.282 8 0.283 9 0.284 4 -0.541 8 -0.585 8 -0.584 4 FEM 0.282 0 0.130 4 0.016 3 0.282 8 0.284 0 0.284 4 -0.524 1 -0.577 5 -0.580 9 0.5 present 0.342 8 0.157 7 0.019 5 0.343 8 0.345 3 0.345 8 -0.644 5 -0.699 2 -0.698 1 FEM 0.342 8 0.157 7 0.019 5 0.343 8 0.345 3 0.345 8 -0.623 6 -0.689 6 -0.694 0 0.8 present 0.717 9 0.325 8 0.039 0 0.720 1 0.723 5 0.724 7 -1.276 4 -1.398 2 -1.397 8 FEM 0.717 5 0.325 6 0.039 0 0.719 7 0.723 1 0.724 3 -1.235 7 -1.379 5 -1.390 3 1.1 present 1.237 8 0.550 5 0.062 7 1.242 0 1.248 5 1.251 0 -2.015 1 -2.243 2 -2.248 1 FEM 1.239 0 0.551 0 0.062 7 1.243 2 1.249 7 1.252 2 -1.957 3 -2.220 2 -2.242 7 1.0 0.3 present 0.141 1 0.064 6 0.007 7 0.141 6 0.142 4 0.142 7 -0.527 7 -0.586 8 -0.591 8 FEM 0.141 1 0.064 6 0.007 7 0.141 6 0.142 4 0.142 7 -0.523 8 -0.580 7 -0.583 4 0.5 present 0.171 5 0.078 1 0.009 1 0.172 2 0.173 1 0.173 5 -0.627 3 -0.700 6 -0.706 9 FEM 0.171 5 0.078 1 0.009 1 0.172 1 0.173 1 0.173 5 -0.622 8 -0.693 5 -0.697 2 0.8 present 0.359 1 0.161 1 0.018 2 0.360 5 0.362 8 0.363 6 -1.240 6 -1.401 7 -1.416 5 FEM 0.359 2 0.161 1 0.018 2 0.360 6 0.362 8 0.363 7 -1.233 1 -1.389 1 -1.398 8 1.1 present 0.619 9 0.272 2 0.029 0 0.622 7 0.627 1 0.628 8 -1.956 6 -2.254 3 -2.283 9 FEM 0.620 0 0.272 2 0.029 0 0.622 8 0.627 2 0.628 9 -1.948 2 -2.237 9 -2.259 7
下载: 导出CSV
表 5 均布谐载下正交各向异性悬臂板的无量纲挠度和弯矩(b=2a)
Table 5. Non-dimensional deflections and bending moments of orthotropic cantilever plates under uniformly distributed harmonic loads, with b=2a
Dy/Dx ω/ω11 method $\bar{w}_p, x=0$ $\bar{w}_p, y=0$ $\bar{M}_y, y=b$ y=0 y=0.4b y=0.8b x=0.1a x=0.3a x=0.5a x=0.1a x=0.3a x=0.5a 0.5 0.3 present 4.615 4 2.159 0 0.282 4 4.616 6 4.618 5 4.619 1 -1.974 6 -2.402 5 -2.481 2 FEM 4.606 3 2.154 8 0.281 9 4.607 5 4.609 3 4.610 0 -2.008 7 -2.385 6 -2.433 1 0.5 present 5.610 5 2.611 4 0.337 9 5.612 0 5.614 4 5.615 3 -2.347 3 -2.866 4 -2.962 1 FEM 5.616 9 2.614 2 0.338 3 5.618 4 5.620 7 5.621 5 -2.395 1 -2.854 6 -2.913 1 0.8 present 11.753 5 5.403 1 0.680 3 11.757 1 11.762 6 11.764 6 -4.645 4 -5.727 6 -5.928 0 FEM 11.754 3 5.403 3 0.680 3 11.757 9 11.763 5 11.765 5 -4.739 4 -5.700 9 -5.827 5 1.1 present 20.257 0 9.139 5 1.102 1 20.264 0 20.274 9 20.278 9 -7.316 8 -9.167 9 -9.513 3 FEM 20.526 7 9.262 1 1.117 2 20.534 0 20.545 3 20.549 5 -7.585 9 -9.262 4 -9.492 9 1.0 0.3 present 2.320 6 1.080 4 0.134 7 2.321 1 2.321 8 2.322 0 -2.052 6 -2.441 8 -2.469 3 FEM 2.320 9 1.080 5 0.134 7 2.321 5 2.322 2 2.322 5 -1.986 0 -2.415 4 -2.469 5 0.5 present 2.820 3 1.306 3 0.161 0 2.821 0 2.821 9 2.822 2 -2.438 1 -2.913 1 -2.948 3 FEM 2.818 8 1.305 6 0.160 9 2.819 5 2.820 5 2.820 8 -2.358 3 -2.880 3 -2.947 0 0.8 present 5.905 2 2.700 3 0.323 1 5.906 8 5.909 0 5.909 8 -4.814 4 -5.819 3 -5.902 5 FEM 5.915 0 2.704 7 0.323 6 5.916 6 5.919 0 5.919 9 -4.669 6 -5.768 4 -5.914 1 1.1 present 10.204 8 4.577 2 0.522 5 10.208 1 10.212 7 10.214 3 -7.581 3 -9.343 8 -9.511 6 FEM 10.147 8 4.551 3 0.519 4 10.151 2 10.156 1 10.158 1 -7.308 0 -9.201 4 -9.465 7
下载: 导出CSV
表 6 中心点处作用集中谐载的正交各向异性悬臂板的无量纲挠度和弯矩(b=a)
Table 6. Non-dimensional deflections and bending moments of orthotropic cantilever plates under concentrated harmonic loads at the center, with b=a
Dy/Dx ω/ω11 method $\bar{w}_{p 0}, x=0$ $\bar{w}_{p 0}, y=0$ $\bar{M}_{y 0}, y=b$ y=0 y=0.4b y=0.8b x=0.1a x=0.3a x=0.5a x=0.1a x=0.3a x=0.5a 0.5 0.3 present 0.238 4 0.115 2 0.014 7 0.240 1 0.242 7 0.243 7 -0.505 7 -0.594 5 -0.613 5 FEM 0.239 8 0.116 3 0.015 0 0.241 2 0.243 3 0.243 7 -0.497 0 -0.589 5 -0.608 3 0.5 present 0.291 9 0.139 2 0.017 5 0.293 8 0.296 7 0.297 7 -0.596 3 -0.694 7 -0.713 8 FEM 0.293 3 0.140 4 0.017 8 0.294 9 0.297 3 0.297 7 -0.585 0 -0.688 6 -0.708 3 0.8 present 0.621 8 0.287 1 0.034 7 0.624 7 0.629 2 0.630 9 -1.152 9 -1.310 4 -1.330 4 FEM 0.623 3 0.288 3 0.035 0 0.625 9 0.629 9 0.630 9 -1.125 0 -1.297 1 -1.322 2 1.1 present 1.098 7 0.483 7 0.054 7 1.101 4 1.105 6 1.107 2 -1.740 2 -1.891 4 -1.876 0 FEM 1.097 1 0.482 3 0.054 4 1.100 1 1.105 0 1.107 3 -1.679 9 -1.866 6 -1.871 2 1.0 0.3 present 0.119 6 0.055 1 0.006 2 0.121 0 0.123 2 0.124 0 -0.466 2 -0.608 5 -0.650 0 FEM 0.120 8 0.056 0 0.006 4 0.122 0 0.123 8 0.124 1 -0.472 5 -0.606 9 -0.640 4 0.5 present 0.146 5 0.067 0 0.007 5 0.148 1 0.150 5 0.151 3 -0.554 7 -0.709 6 -0.752 4 FEM 0.147 8 0.068 0 0.007 7 0.149 1 0.151 1 0.151 4 -0.560 9 -0.707 4 -0.741 6 0.8 present 0.312 7 0.140 6 0.015 6 0.315 0 0.318 5 0.319 7 -1.098 9 -1.331 8 -1.382 0 FEM 0.314 3 0.141 7 0.015 8 0.316 3 0.319 2 0.319 8 -1.103 3 -1.325 1 -1.363 9 1.1 present 0.554 6 0.243 2 0.026 3 0.556 0 0.558 4 0.559 4 -1.733 2 -1.905 5 -1.894 0 FEM 0.552 2 0.241 6 0.026 0 0.554 1 0.557 3 0.559 4 -1.708 7 -1.884 1 -1.874 8
下载: 导出CSV
表 7 中心点处作用集中谐载的正交各向异性悬臂板的无量纲挠度和弯矩(b=2a)
Table 7. Non-dimensional deflections and bending moments of orthotropic cantilever plates under concentrated harmonic loads at the center, with b=2a
Dy/Dx ω/ω11 method $\bar{w}_{p 0}, x=0$ $\bar{w}_{p 0}, y=0$ $\bar{M}_{y 0}, y=b$ y=0 y=0.4b y=0.8b x=0.1a x=0.3a x=0.5a x=0.1a x=0.3a x=0.5a 0.5 0.3 present 1.937 8 0.980 7 0.139 4 1.938 2 1.938 6 1.938 8 -0.983 3 -1.185 2 -1.221 7 FEM 1.934 2 0.979 0 0.139 2 1.934 5 1.935 0 1.935 1 -1.000 2 -1.177 4 -1.198 6 0.5 present 2.370 1 1.177 5 0.163 6 2.370 5 2.371 2 2.371 5 -1.146 1 -1.387 7 -1.431 5 FEM 2.373 6 1.179 1 0.163 8 2.374 1 2.374 7 2.375 0 -1.169 0 -1.382 2 -1.408 2 0.8 present 5.039 4 2.391 4 0.312 6 5.040 8 5.042 8 5.043 5 -2.147 3 -2.633 3 -2.722 3 FEM 5.042 4 2.392 7 0.312 7 5.043 8 5.045 8 5.046 6 -2.190 6 -2.622 1 -2.677 7 1.1 present 8.874 9 3.928 8 0.461 8 8.878 2 8.883 3 8.885 2 -3.051 2 -3.838 5 -3.985 4 FEM 8.824 1 3.905 7 0.458 9 8.827 4 8.832 4 8.834 2 -3.097 0 -3.799 0 -3.896 9 1.0 0.3 present 0.978 4 0.490 4 0.066 4 0.978 5 0.978 5 0.978 5 -1.020 8 -1.205 4 -1.217 4 FEM 0.978 6 0.490 5 0.066 4 0.978 6 0.978 7 0.978 7 -0.988 0 -1.192 4 -1.217 5 0.5 present 1.196 1 0.589 0 0.077 9 1.196 3 1.196 4 1.196 4 -1.189 6 -1.411 7 -1.427 1 FEM 1.195 5 0.588 7 0.077 8 1.195 6 1.195 7 1.195 8 -1.151 0 -1.395 9 -1.426 4 0.8 present 2.540 8 1.197 0 0.148 6 2.541 3 2.542 0 2.542 2 -2.227 0 -2.680 6 -2.717 1 FEM 2.545 7 1.199 2 0.148 9 2.546 3 2.547 0 2.547 3 -2.161 1 -2.657 6 -2.722 6 1.1 present 4.483 7 1.975 6 0.219 9 4.485 2 4.487 5 4.488 3 -3.171 7 -3.927 2 -4.001 6 FEM 4.459 3 1.964 5 0.218 6 4.461 0 4.463 4 4.464 4 -3.059 2 -3.867 5 -3.981 4
下载: 导出CSV
表 8 (a/4, 0)处作用集中谐载的正交各向异性悬臂板的无量纲挠度和弯矩(b=a)
Table 8. Non-dimensional deflections and bending moments of orthotropic cantilever plates under concentrated harmonic loads at (a/4, 0), with b=a
Dy/Dx ω/ω11 method $\bar{w}_{p 0}, x=0$ $\bar{w}_{p 0}, y=0$ $\bar{M}_{y 0}, y=b$ y=0 y=0.4b y=0.8b x=0.1a x=0.3a x=0.5a x=0.1a x=0.3a x=0.5a 0.5 0.3 present 0.897 5 0.390 6 0.046 0 0.878 7 0.831 3 0.758 7 -1.399 6 -1.379 7 -1.235 3 FEM 0.907 3 0.394 0 0.046 4 0.887 1 0.835 6 0.762 2 -1.384 1 -1.370 2 -1.232 8 0.5 present 1.058 0 0.463 1 0.054 5 1.038 9 0.990 6 0.915 9 -1.671 8 -1.677 9 -1.525 7 FEM 1.068 3 0.466 7 0.055 0 1.047 8 0.995 3 0.920 3 -1.652 2 -1.663 6 -1.522 5 0.8 present 2.032 0 0.901 2 0.105 8 2.013 8 1.965 8 1.884 4 -3.344 3 -3.484 5 -3.318 1 FEM 2.044 6 0.905 9 0.106 4 2.024 9 1.972 4 1.894 0 -3.260 5 -3.452 4 -3.310 8 1.1 present 2.962 7 1.334 0 0.152 7 3.001 2 3.072 0 3.163 9 -5.033 3 -5.829 0 -6.038 9 FEM 2.958 2 1.332 7 0.152 5 2.998 4 3.085 1 3.182 2 -4.878 6 -5.767 2 -6.024 8 1.0 0.3 present 0.543 1 0.236 5 0.026 5 0.519 4 0.460 6 0.382 2 -1.624 4 -1.525 2 -1.255 8 FEM 0.555 5 0.240 8 0.027 0 0.529 8 0.467 3 0.383 4 -1.641 7 -1.524 5 -1.245 4 0.5 present 0.632 3 0.276 9 0.031 2 0.606 9 0.543 9 0.461 2 -1.926 3 -1.839 7 -1.550 3 FEM 0.645 5 0.281 6 0.031 7 0.618 0 0.551 4 0.462 7 -1.945 1 -1.838 0 -1.537 1 0.8 present 1.144 1 0.506 7 0.057 0 1.114 4 1.043 5 0.947 7 -3.687 3 -3.715 0 -3.364 2 FEM 1.164 5 0.514 5 0.057 9 1.132 2 1.054 5 0.951 8 -3.666 5 -3.699 4 -3.338 2 1.1 present 1.276 3 0.557 2 0.057 1 1.332 5 1.453 3 1.590 3 -4.208 2 -5.501 4 -6.133 2 FEM 1.264 1 0.552 6 0.056 4 1.323 9 1.453 9 1.600 2 -4.137 6 -5.445 4 -6.072 5
下载: 导出CSV
表 9 (a/4, 0)处作用集中谐载的正交各向异性悬臂板的无量纲挠度和弯矩(b=2a)
Table 9. Non-dimensional deflections and bending moments of orthotropic cantilever plates under concentrated harmonic loads at (a/4, 0), with b=2a
Dy/Dx ω/ω11 method $\bar{w}_{p 0}, x=0$ $\bar{w}_{p 0}, y=0$ $\bar{M}_{y 0}, y=b$ y=0 y=0.4b y=0.8b x=0.1a x=0.3a x=0.5a x=0.1a x=0.3a x=0.5a 0.5 0.3 present 6.504 9 2.821 9 0.340 9 6.445 4 6.316 0 6.164 4 -2.284 7 -2.648 6 -2.596 4 FEM 6.513 0 2.822 7 0.340 8 6.453 1 6.322 1 6.167 5 -2.330 2 -2.634 0 -2.554 8 0.5 present 7.784 6 3.403 4 0.412 3 7.724 8 7.594 9 7.565 5 -2.764 4 -3.242 9 -3.210 4 FEM 7.813 0 3.413 4 0.413 3 7.752 9 7.621 3 7.465 6 -2.827 4 -3.234 8 -3.168 1 0.8 present 15.669 6 6.986 2 0.851 7 15.610 9 15.481 9 15.393 4 -5.716 1 -6.909 8 -7.006 0 FEM 15.702 4 6.998 3 0.853 1 15.643 3 15.512 5 15.355 2 -5.842 0 -6.887 8 -6.903 6 1.1 present 25.350 4 11.650 1 1.432 2 25.425 1 25.579 9 25.609 7 -9.617 3 -12.187 7 -12.795 1 FEM 25.238 0 11.601 5 1.426 2 25.313 2 25.469 9 25.640 0 -9.777 2 -12.088 8 -12.533 9 1.0 0.3 present 3.572 0 1.558 5 0.183 2 3.486 9 3.306 3 3.090 6 -2.634 7 -2.827 9 -2.597 5 FEM 3.586 2 1.561 9 0.183 5 3.500 2 3.316 4 3.109 3 -2.550 5 -2.810 1 -2.603 6 0.5 present 4.224 1 1.854 6 0.218 1 4.137 2 3.952 7 3.730 5 -3.145 4 -3.439 0 -3.209 9 FEM 4.237 2 1.857 6 0.218 3 4.149 3 3.961 6 3.750 3 -3.044 6 -3.414 2 -3.215 1 0.8 present 8.211 3 3.660 0 0.429 0 8.120 2 7.926 2 7.700 7 -6.236 8 -7.185 1 -6.995 2 FEM 8.245 7 3.672 5 0.430 4 8.153 5 7.956 4 7.734 4 -6.057 4 -7.143 7 -7.022 5 1.1 present 12.410 5 5.649 1 0.650 7 12.517 1 12.738 7 12.967 4 -9.583 4 -12.238 8 -12.794 6 FEM 12.353 7 5.626 1 0.648 1 12.461 7 12.687 2 12.932 3 -9.266 6 -12.068 7 -12.757 3
下载: 导出CSV
表 10 正交各向异性悬臂板的挠度和弯矩分布云图
Table 10. Contour plots of deflections and bending moments of the orthotropic cantilever plate

-
[1] ALFOONEH M, HAJABBASI M. Free and forced vibration analysis of thin and thick plates by the finite element method using Lagrange and heterosis elements and comparison of these elements[J]. WSEAS Transactions on Systems, 2007, 6(1): 235-241. [2] MEI C. A finite element method for nonlinear forced vibrations of rectangular plates[J]. AIAA Journal, 1985, 23(7): 1104-1110. doi: 10.2514/3.9044 [3] NAYAK A, SINHA L, JENA T. Forced vibration analysis of laminated composite stiffened plates[J]. International Journal of Structural Engineering, 2021, 11(2): 173. doi: 10.1504/IJSTRUCTE.2021.114263 [4] ALTINTA G, BAGCI M. Determination of the steady-state response of viscoelastically supported rectangular othotropic mass loaded plates by an energy-based finite difference method[J]. Journal of Vibration and Control, 2005, 11(12): 1535-1552. doi: 10.1177/1077546305061037 [5] NAJARZADEH L, MOVAHEDIAN B, AZHARI M. Free vibration and buckling analysis of thin plates subjected to high gradients stresses using the combination of finite strip and boundary element methods[J]. Thin-Walled Structures, 2018, 123: 36-47. doi: 10.1016/j.tws.2017.11.015 [6] HEUER R, IRSCHIK H. A boundary element method for eigenvalue problems of polygonal membranes and plates[J]. Acta Mechanica, 1987, 66(1/4): 9-20. [7] RODRIGUES J D, ROQUE C M C, FERREIRA A J M. An improved meshless method for the static and vibration analysis of plates[J]. Mechanics Based Design of Structures and Machines, 2013, 41(1): 21-39. doi: 10.1080/15397734.2012.680348 [8] HOSSEINI S, RAHIMI G, ANANI Y. A meshless collocation method based on radial basis functions for free and forced vibration analysis of functionally graded plates using FSDT[J]. Engineering Analysis With Boundary Elements, 2021, 125: 168-177. doi: 10.1016/j.enganabound.2020.12.016 [9] 王伟, 伊士超, 姚林泉. 分析复合材料层合板弯曲和振动的一种有效无网格方法[J]. 应用数学和力学, 2015, 36(12): 1274-1284. doi: 10.3879/j.issn.1000-0887.2015.12.006WANG Wei, YI Shichao, YAO Linquan. An effective meshfree method for bending and vibration analyses of laminated composite plates[J]. Applied Mathematics and Mechanics, 2015, 36(12): 1274-1284. (in Chinese) doi: 10.3879/j.issn.1000-0887.2015.12.006 [10] 彭林欣, 张鉴飞, 陈卫. 基于3D连续壳理论和无网格法的任意壳受迫振动分析[J]. 固体力学学报, 2024, 45(2): 238-252.PENG Linxin, ZHANG Jianfei, CHEN Wei. Forced vibration analysis of arbitrary shells based on 3D continuous shell theory and meshless method[J]. Chinese Journal of Solid Mechanics, 2024, 45(2): 238-252. (in Chinese) [11] ZAMANIFAR H, SARRAMI-FOROUSHANI S, AZHARI M. Static and dynamic analysis of corrugated-core sandwich plates using finite strip method[J]. Engineering Structures, 2019, 183: 30-51. doi: 10.1016/j.engstruct.2018.12.102 [12] SHEIKH A H, MUSHOPADYAY M. Forced vibration of plates with elastically restrained edges by the spline finite strip method[J]. JSME International Journal (Series C): Dynamics Control Robotics Design and Manufacturing, 1993, 36(3): 301-306. doi: 10.1299/jsmec1993.36.301 [13] YUAN W, DAWE D J. Free vibration and stability analysis of stiffened sandwich plates[J]. Composite Structures, 2004, 63(1): 123-137. doi: 10.1016/S0263-8223(03)00139-9 [14] 陈明飞, 刘坤鹏, 靳国永, 等. 面内功能梯度三角形板等几何面内振动分析[J]. 应用数学和力学, 2020, 41(2): 156-170. doi: 10.21656/1000-0887.400171CHEN Mingfei, LIU Kunpeng, JIN Guoyong, et al. Isogeometric in-plane vibration analysis of functionally graded triangular plates[J]. Applied Mathematics and Mechanics, 2020, 41(2): 156-170. (in Chinese) doi: 10.21656/1000-0887.400171 [15] LAURA P A A, DURAN R. A note on forced vibrations of a clamped rectangular plate[J]. Journal of Sound and Vibration, 1975, 42(1): 129-135. doi: 10.1016/0022-460X(75)90307-7 [16] SUSEMIHL E A, LAURA P A A. Forced vibrations of thin, elastic, rectangular plates with edges elastically restrained against rotation[J]. Journal of Ship Research, 1977, 21(1): 24-29. doi: 10.5957/jsr.1977.21.1.24 [17] GORMAN D J. Dynamic response of a rectangular plate to a bending moment distributed along the diagonal[J]. AIAA Journal, 1982, 20(11): 1616-1621. doi: 10.2514/3.7994 [18] 付宝连, 李农. 弹性矩形薄板受迫振动的功的互等定理法(Ⅰ): 四边固定的矩形板和三边固定的矩形板[J]. 应用数学和力学, 1989, 10(8): 693-714. http://www.applmathmech.cn/article/id/3613FU Baolian, LI Nong. The method of the reciprocal theorem of forced vibration for the elastic thin rectangular plates (Ⅰ): rectangular plates with four clamped edges and with three clamped edges[J]. Applied Mathematics and Mechanics, 1989, 10(8): 693-714. (in Chinese) http://www.applmathmech.cn/article/id/3613 [19] 付宝连, 李农. 弹性矩形薄板受迫振动的功的互等定理法(Ⅱ): 二邻边固定的矩形板[J]. 应用数学和力学, 1990, 11(11): 977-988. http://www.applmathmech.cn/article/id/3452FU Baolian, LI Nong. The method of the reciprocal theorem of forced vibration for the elastic thin rectangular plates (Ⅱ): rectangular plates with two adjacent clamped edges[J]. Applied Mathematics and Mechanics, 1990, 11(11): 977-988. (in Chinese) http://www.applmathmech.cn/article/id/3452 [20] 付宝连, 李农. 弹性矩形薄板受迫振动的功的互等定理法(Ⅲ): 悬臂矩形板[J]. 应用数学和力学, 1991, 12(7): 621-638. http://www.applmathmech.cn/article/id/3354FU Baolian, LI Nong. The method of the reciprocal theorem of forced vibration for the elastic thin rectangular plates (Ⅲ): cantilever rectangular plates[J]. Applied Mathematics and Mechanics, 1991, 12(7): 621-638. (in Chinese) http://www.applmathmech.cn/article/id/3354 [21] XING Y F, LIU B. New exact solutions for free vibrations of thin orthotropic rectangular plates[J]. Composite Structures, 2009, 89(4): 567-574. doi: 10.1016/j.compstruct.2008.11.010 [22] CHEN Y, YUE X. Forced vibration of bending thick rectangular plates with different boundary conditions under concentrated load[J]. Chinese Journal of Computational Mechanics, 2022, 39(6): 845-851. [23] 陈英杰, 程剑锋, 陈杰, 等. 集中谐载力作用下三边固定一边自由板的受迫振动[J]. 动力学与控制学报, 2005, 3(3): 47-51.CHEN Yingjie, CHENG Jianfeng, CHEN Jie, et al. The forced vibration of the plate with three clamped and the other free under concentrated load[J]. Journal of Dynamics and Control, 2005, 3(3): 47-51. (in Chinese) [24] LI R, ZHONG Y, LI M. Analytic bending solutions of free rectangular thin plates resting on elastic foundations by a new symplectic superposition method[J]. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2013, 469(2153): 20120681. doi: 10.1098/rspa.2012.0681 [25] ZHENG X, SUN Y, HUANG M, et al. Symplectic superposition method-based new analytic bending solutions of cylindrical shell panels[J]. International Journal of Mechanical Sciences, 2019, 152: 432-442. doi: 10.1016/j.ijmecsci.2019.01.012 [26] LI R, ZHENG X, WANG P, et al. New analytic free vibration solutions of orthotropic rectangular plates by a novel symplectic approach[J]. Acta Mechanica, 2019, 230(9): 3087-3101. doi: 10.1007/s00707-019-02448-1 [27] XU D, NI Z, LI Y, et al. On the symplectic superposition method for free vibration of rectangular thin plates with mixed boundary constraints on an edge[J]. Theoretical and Applied Mechanics Letters, 2021, 11(5): 100293. doi: 10.1016/j.taml.2021.100293 [28] ZHOU C, AN D, ZHOU J, et al. On new buckling solutions of moderately thick rectangular plates by the symplectic superposition method within the Hamiltonian-system framework[J]. Applied Mathematical Modelling, 2021, 94: 226-241. doi: 10.1016/j.apm.2021.01.020 [29] HU Z, ZHENG X, AN D, et al. New analytic buckling solutions of side-cracked rectangular thin plates by the symplectic superposition method[J]. International Journal of Mechanical Sciences, 2021, 191: 106051. doi: 10.1016/j.ijmecsci.2020.106051 [30] LEISSA A W. Vibration of plates: NASA-SP-160[R]. 1969. [31] YAO W, ZHONG W, LIM C W. Symplectic Elasticity[M]. Singapore: World Scientific, 2009. -

计量
- 文章访问数: 868
- HTML全文浏览量: 305
- PDF下载量: 105
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号